IPC Architecture¶
Workers communicate with the MOSAIC core through a layered IPC (Inter-Process Communication) architecture built on gRPC and JSONL over stdout.
Three-Tier Process Model¶
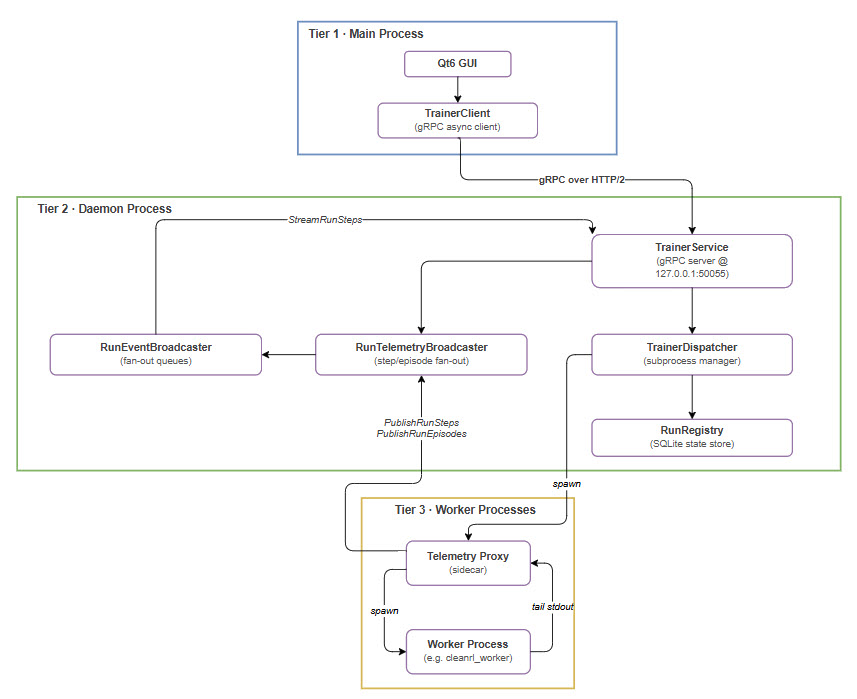
Process Hierarchy¶
MOSAIC GUI (PID 12345)
└── Trainer Daemon (PID 12346) <-- spawned at startup
├── Telemetry Proxy (PID 12348) <-- spawned per job
│ └── Worker Process (PID 12349)
│ └── CleanRL PPO (in-process)
└── Telemetry Proxy (PID 12350) <-- another job
└── Worker Process (PID 12351)
Each worker is launched with os.setsid() to create a new process
group, allowing the entire tree to be killed with a single SIGTERM.
gRPC Protocol¶
MOSAIC uses gRPC (Protocol Buffers over HTTP/2) for all structured communication between the GUI, Daemon, and workers.
Aspect |
Value |
|---|---|
Transport |
HTTP/2 over TCP (loopback: |
Serialization |
Protocol Buffers v5.27.2 |
Max Message |
64 MB send/receive |
Keepalive |
HTTP/2 pings every 30 s |
Security |
Insecure (loopback only) |
RPC Methods¶
sequenceDiagram
participant GUI
participant Daemon
participant Proxy as Telemetry Proxy
participant Worker
GUI->>Daemon: SubmitRun(config_json)
Daemon-->>GUI: run_id
Note over Daemon: Status: INIT
Daemon->>Proxy: spawn subprocess
Proxy->>Worker: spawn subprocess
Worker->>Daemon: RegisterWorker(capabilities)
Daemon-->>Worker: session_token
Note over Daemon: Status: HANDSHAKE → READY
Worker->>Proxy: JSONL to stdout
Proxy->>Daemon: PublishRunSteps(stream)
Note over Daemon: Status: READY → EXECUTING
Daemon->>GUI: StreamRunSteps(stream)
Note over Worker: Training loop...
Worker->>Proxy: run_completed event
Proxy->>Daemon: Close stream
Note over Daemon: EXECUTING → TERMINATED
Daemon->>GUI: RunUpdate(TERMINATED)
The full RPC surface:
RPC Method |
Type |
Description |
|---|---|---|
|
Unary |
Submit a new training run; returns |
|
Unary |
Cancel a running job |
|
Unary |
Query runs by status |
|
Server stream |
Live stream of run status changes |
|
Unary |
Worker handshake; returns |
|
Client stream |
Worker → Daemon step telemetry |
|
Client stream |
Worker → Daemon episode summaries |
|
Server stream |
Daemon → GUI live step data |
|
Server stream |
Daemon → GUI live episode data |
|
Unary |
Worker liveness signal (every 60 s) |
Telemetry Pipeline¶
Workers emit telemetry as newline-delimited JSON (JSONL) to
stdout. This is the simplest possible integration: any script that
can print() can become a MOSAIC worker.
graph TB
W["Worker<br/>print(json)"] -->|"stdout"| P["Telemetry Proxy<br/>(JsonlTailer)"]
P -->|"parse + validate"| PB["Protobuf<br/>RunStep / RunEpisode"]
PB -->|"gRPC stream"| D["Daemon"]
D -->|"persist"| SQL["SQLite"]
D -->|"fan-out"| BUS["RunBus"]
BUS -->|"gRPC stream"| GUI["Qt6 GUI"]
style W fill:#ff7f50,stroke:#cc5500,color:#fff
style P fill:#ffd700,stroke:#b8860b
style D fill:#50c878,stroke:#2e8b57,color:#fff
style GUI fill:#4a90d9,stroke:#2e5a87,color:#fff
JSONL Event Types¶
Step event: emitted every environment step:
{
"event_type": "step",
"run_id": "01ARZ3NDEKTSV4RRFFQ69G5FAV",
"episode": 0,
"step_index": 42,
"action": 1,
"observation": [0.02, -0.01, 0.03, -0.02],
"reward": 1.0,
"terminated": false,
"truncated": false
}
Episode event: emitted when an episode ends:
{
"event_type": "episode",
"run_id": "01ARZ3NDEKTSV4RRFFQ69G5FAV",
"episode": 0,
"total_reward": 195.0,
"steps": 195,
"terminated": true,
"truncated": false
}
Lifecycle event: emitted at run boundaries:
{
"event": "run_started",
"run_id": "01ARZ3NDEKTSV4RRFFQ69G5FAV",
"payload": {
"worker_id": "worker-001",
"env_id": "CartPole-v1",
"algo": "ppo"
}
}
The Telemetry Proxy¶
Workers never speak gRPC directly. A Telemetry Proxy sidecar
(spawned by the Daemon alongside the worker) reads stdout,
parses each JSON line, validates it against versioned schemas,
converts it to a Protocol Buffer message, and streams it to the
Daemon.
This sidecar architecture provides two benefits:
Workers stay simple: no gRPC client code, no protobuf imports
Fault isolation: a malformed log line cannot crash the worker
Reliability Mechanisms¶
Heartbeats¶
Workers send a Heartbeat RPC every 60 seconds. If the Daemon
receives no heartbeat for 300 seconds (5 minutes), the run transitions
to FAULTED and GPU resources are released.
Backpressure¶
A credit-based system prevents memory exhaustion when workers produce telemetry faster than the GUI can render:
graph LR
W["Worker"] -->|"fast"| D["Daemon<br/>Credit Manager"]
D -->|"stream"| G["GUI"]
G -->|"refill credits<br/>after rendering"| D
style W fill:#ff7f50,stroke:#cc5500,color:#fff
style D fill:#50c878,stroke:#2e8b57,color:#fff
style G fill:#4a90d9,stroke:#2e5a87,color:#fff
When credits are exhausted, the hub emits CONTROL STARVED and
slows ingestion. Once the GUI renders queued frames, credits are
refilled and CONTROL RESUMED is emitted.
Reconnection¶
The GUI tracks the last received seq_id for each run. On
reconnection, it requests StreamRunSteps(run_id, since_seq=last_seq)
to resume from where it left off, ensuring no data is lost.
Performance¶
Metric |
Value |
Notes |
|---|---|---|
gRPC latency |
~1–3 ms |
Localhost unary call |
Telemetry throughput |
10 k+ steps/s |
Limited by JSON parsing |
Queue depth |
4096 steps |
Per-run circular buffer |
Max concurrent runs |
100+ |
Limited by GPU / memory |
SQLite write speed |
~5 k inserts/s |
WAL mode enabled |
Max message size |
64 MB |
gRPC send/receive limit |